TagSLAM: Robust SLAM with Fiducial Markers
 TagSLAM
TagSLAM
Abstract
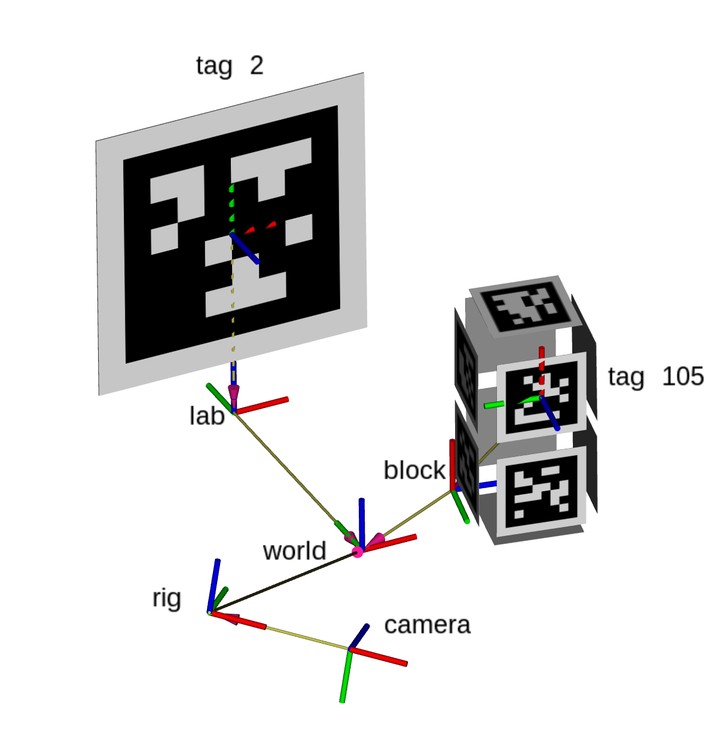
TagSLAM provides a convenient, flexible, and robust way of performing Simultaneous Localization and Mapping (SLAM) with AprilTag fiducial markers. By leveraging a few simple abstractions (bodies, tags, cameras), TagSLAM provides a front end to the GTSAM factor graph optimizer that makes it possible to rapidly design a range of experiments that are based on tags, e.g. full SLAM, extrinsic camera calibration with non-overlapping views, visual localization for ground truth, loop closure for odometry, pose estimation etc. We discuss in detail how TagSLAM initializes the factor graph in a robust way, and present loop closure as an application example. TagSLAM is a ROS based open source package and can be found at “https://berndpfrommer.github.io/tagslam_web/"
Bernd Pfrommer
Independent Researcher
My research interests include computer vision, autonomous systems, event based cameras and machine learning