
Filter-Based Reconstruction of Images from Events
FIBAR is an algorithm to reconstruct brightness images from event camera events.
I am an independent researcher and consultant for computer vision and robotics. My particular interests are in event based cameras and autonomous systems.
PhD Physics
UC Berkeley
MS Computer Science
UC Berkeley
Diploma Physics
Universitaet Stuttgart
FIBAR is an algorithm to reconstruct brightness images from event camera events.
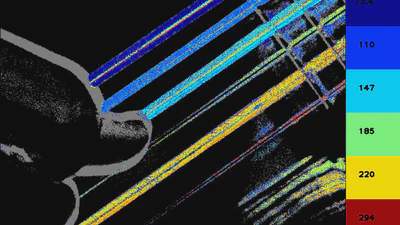
FrequencyCam is a software package to measure and visualize the frequency of flickering images with an event based camera.

Dataset and Pipeline for avian pose recovery from a single view.
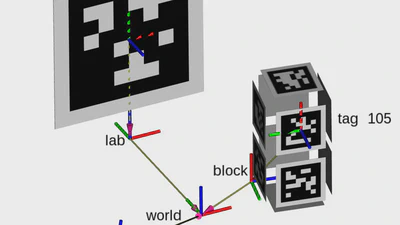
TagSLAM provides a convenient, flexible, and robust way of performing Simultaneous Localization and Mapping (SLAM) with AprilTag fiducial markers.
We have determined the hydrogen-bond geometry in liquid water from 0 to 80C by combining measurements of the proton magnetic shielding tensor with ab initio density functional …
FIBAR is an algorithm to reconstruct brightness images from event camera events.
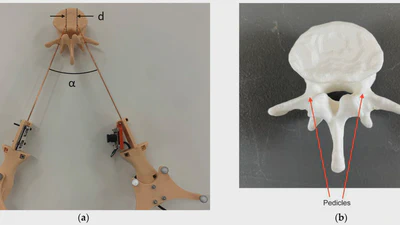
Development of a microwave transmission based probe for vertebrae strength.
FrequencyCam is a software package to measure and visualize the frequency of flickering images with an event based camera.
Dataset and Pipeline for avian pose recovery from a single view.
TagSLAM provides a convenient, flexible, and robust way of performing Simultaneous Localization and Mapping (SLAM) with AprilTag fiducial markers.